| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
- 유니티
- 김성훈 교수님
- Jacobian Matrix
- neural network
- statistics
- Series
- Linear algebra
- 리스트
- ML-Agent
- convex optimization
- rl
- 데이터 분석
- 논문
- 딥러닝
- unity
- Laplacian
- 판다스
- pandas
- Python Programming
- paper
- Hessian Matrix
- reinforcement learning
- machine learning
- 사이킷런
- David Silver
- 모두를 위한 RL
- Deep Learning
- list
- 강화학습
- optimization
RL Researcher
Lecture 02 : Markov Decision Processes 본문
Lecture 02 : Markov Decision Processes
Lass_os 2021. 2. 2. 01:44
- MDP는 강화학습에서의 환경을 나타냅니다.
- Environment가 모두 관찰가능한 상황일 경우에 이것을 MDP라고 부릅니다.
- 현재의 State가 Process에 대해 완전히 표현하는 것입니다.
- 거의 모든 강화학습 문제는 MDP문제로 정의할 수 있습니다.

- 현재가 있다면 미래는 과거와 독립적이다.
$$P[S_{t+1} \mid S_{t}\ = P[S_{t+1} \mid S_{1}, ..., S_{t}]$$
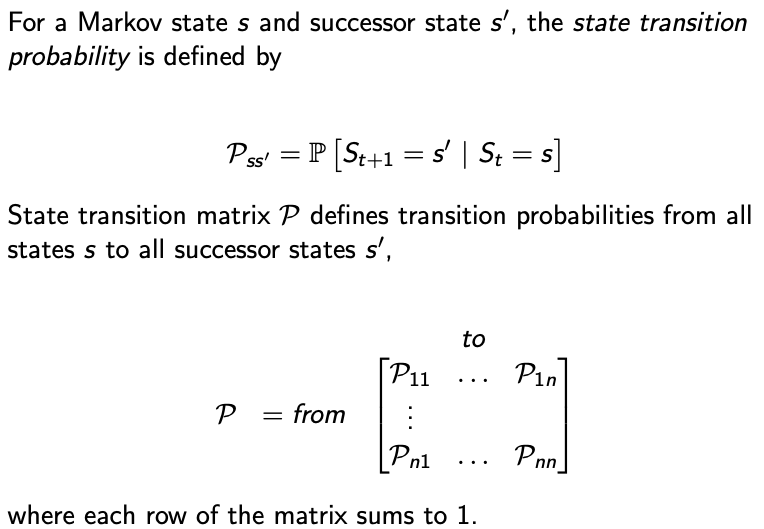
- Markov State인 $s$ 그리고 다음상태가 $s^{'}$, 상태천이 확률은 다음과 같이 정의됩니다.
$$P_{ss'} = P[S_{t+1} = s' \mid S_{t} = s]$$
- 상태천이 행렬 $P$는 State $s$에서 다음 상태인 $s'$으로 갈때의 천이 확률을 정의합니다.
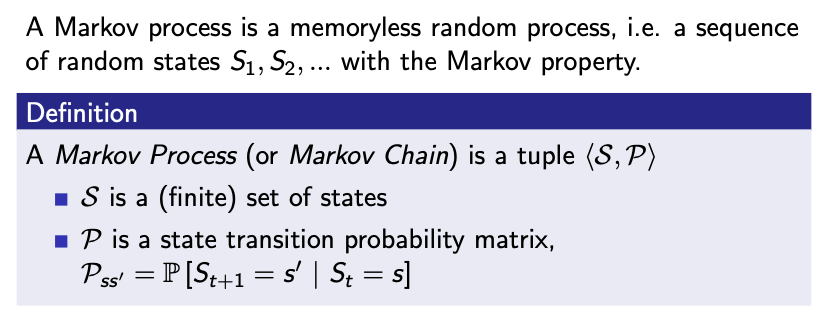
- Markov Process (또는 마르코프 체인) 은 $<S,P>$로 이루어져 있습니다.
- $S$는 유한한 State들의 집합입니다.
- $P$는 상태 천이 확률을 나타냅니다.
$$P_{ss'} = P[S_{t+1} = s' \mid S_{t} = s]$$
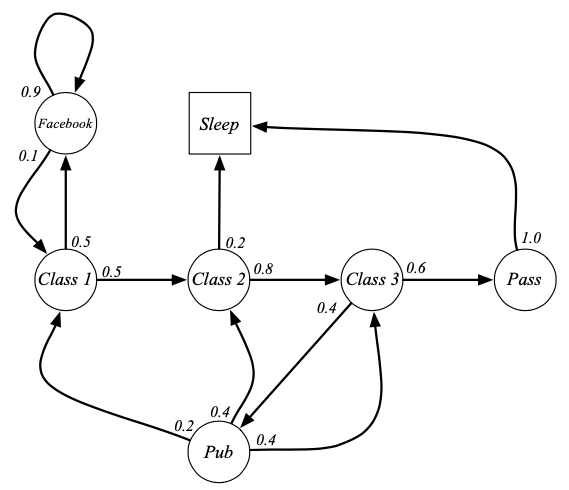

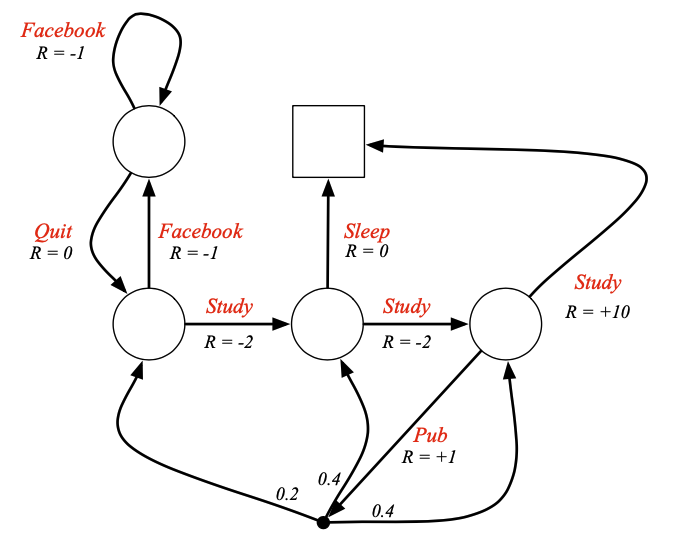
Episode란 시작점부터 Terminal State까지 가는것이 1번의 Episode입니다.

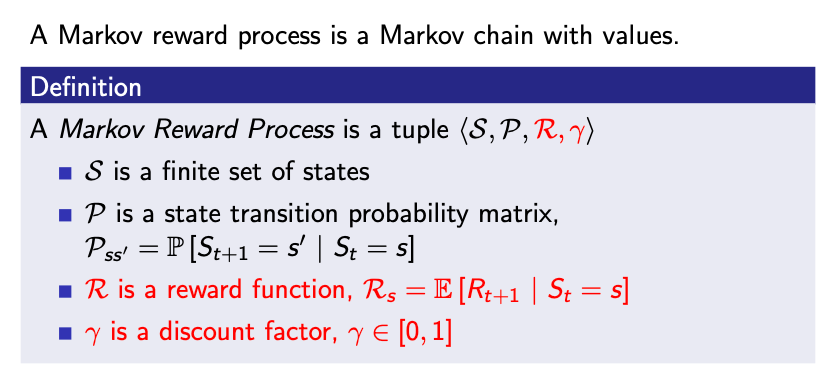
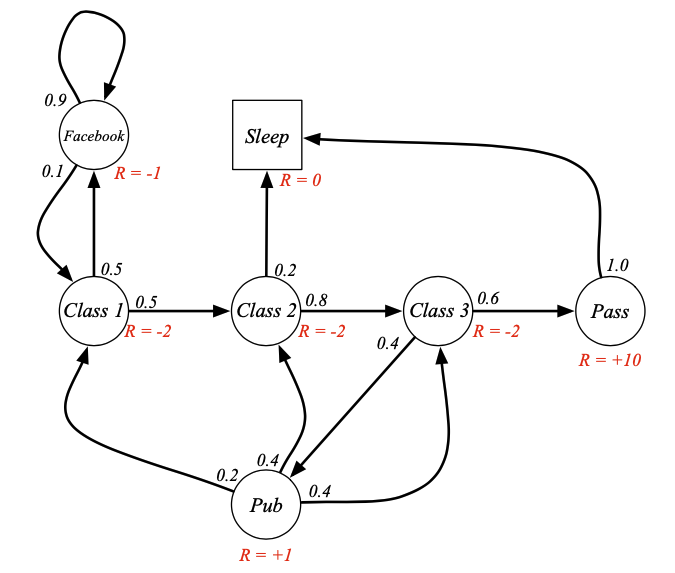
- MRP는 $<S,P,R,\gamma>$값의 튜플로 표현할 수 있습니다.
- $R$은 보상함수이고, $R_{s} = E[R_{t+1} \mid S_{t} = s]$ 로 정의됩니다.
- $\gamma$는 감가율이며, $\gamma \in [0,1]$로 정의됩니다($\gamma$값은 0과 1사이의 실수입니다.)
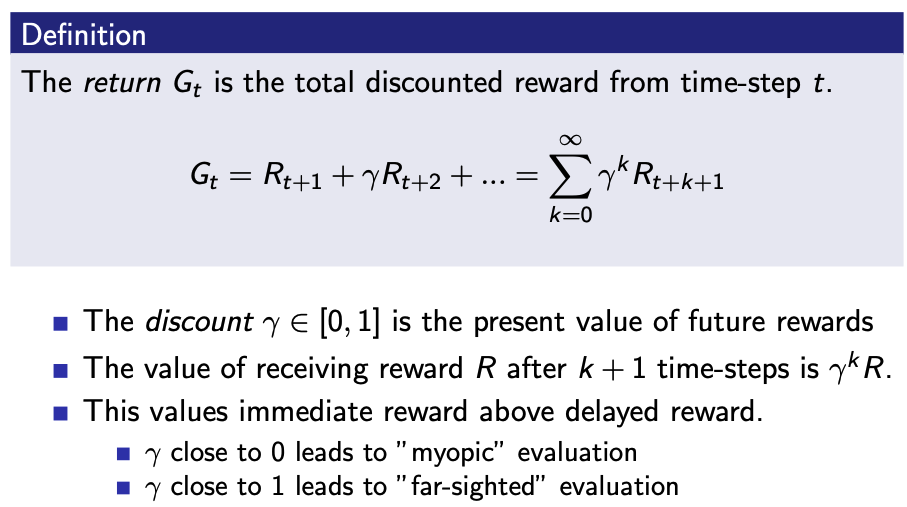
- 강화학습은 Return을 최대화하는 것입니다.
- Return은 $G_{t}$로 표시합니다.
- Return은 미래의 보상을 총 합을 말하지만 미래의 보상에다 감가율을 곱합니다.
$$G_{t} = R_{t+1} + \gamma R_{t+2} + ... = \sum_{k=0}^{\infty}\gamma^{k}R_{t+k+1}$$
- $\gamma$가 0에 가까워 질수록 "근시" 평가를 하게 됩니다. (즉, 가까운 보상에 대한 것만 평가함)
- $\gamma$가 1에 가까워 질수록 "원시" 평가를 하게 됩니다. (즉, 멀리 있는 보상에 대해 평가함)

- 솔직히 얘기하자면 감가율을 곱하는 이유는 수학적으로 편리하기 때문입니다.
- 이론적인 이야기를 하자면 사람들은 눈앞에 있는 보상을 원하지, 현재와 같은 보상을 미래에 받기를 원하지 않습니다. 예를 들면 지금 만원을 받을것인가, 10년뒤에 만원을 받을 것인가 물어본다면 어떻게 대답할 것인가?
- 어떤 행동을 해도 Terminal State로 갈 때는 $\gamma$를 1로 설정해도 되는 경우가 있습니다.
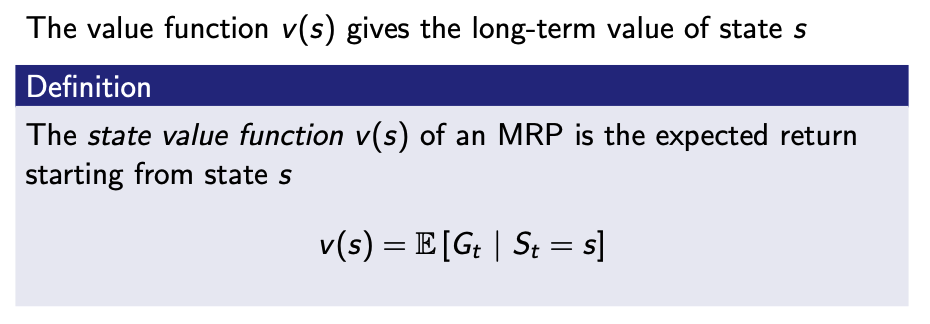
- Value Function은 Return의 기댓값(Expectation Value)입니다.
$$ v(s) = E[G_{t} \mid S_{t} = s] $$



다음 식은 중요한 이론에만 대해서 정의하겠습니다.
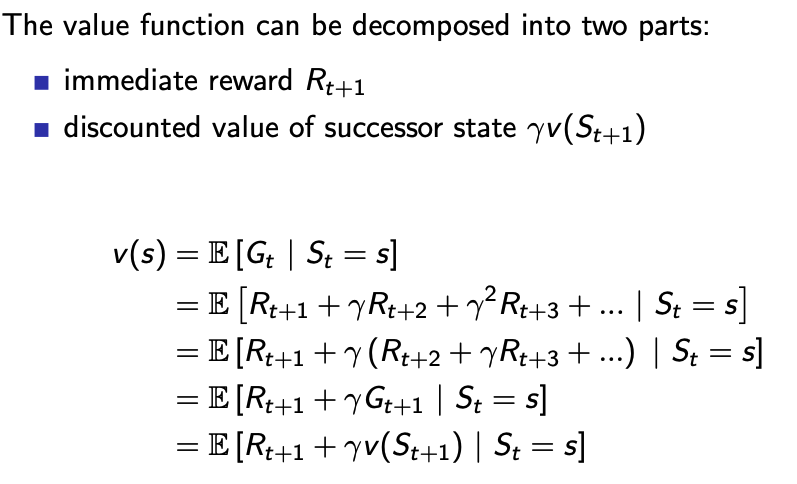
- 가치함수는 두개의 부분으로 분해할 수 있습니다.
- 즉각적인 보상 $R_{t+1}$
- 다음 State에 대한 할인된 값인 $\gamma v(S_{t+1})$
- 현재 State에 대한 Value Function은 현재 State에 대한 Return값의 기댓값입니다.
- 아래의 식은 Return값을 풀어서 쓴 식입니다.
- 그 뒤 $\gamma$로 묶어줍니다,
- 묶어서 쓴식은 또 $\gamma$Return값으로 표현할 수 있습니다.
- 마지막으로 Reutrn값은 다음 State에 대한 Value Function에 Discount Factor를 곱한값으로 표현이 가능합니다.
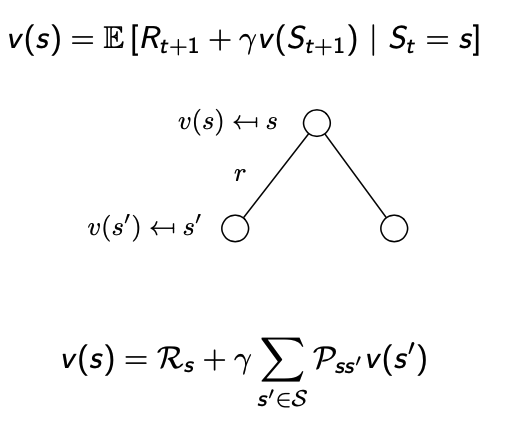
위의 그림은 Bellman Equation의 MRP에 대한 수식을 그림으로 나타낸 것입니다.

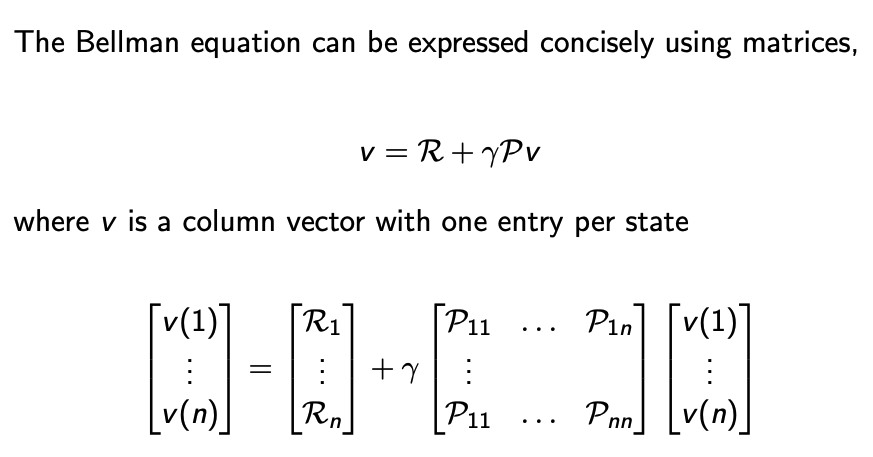
- 벨만 방정식은 간결하게 행렬을 사용하여 표현할 수 있습니다.
$$v = R + \gamma Pv$$
위의 수식을 알면 Value function을 한번에 알 수 있습니다.
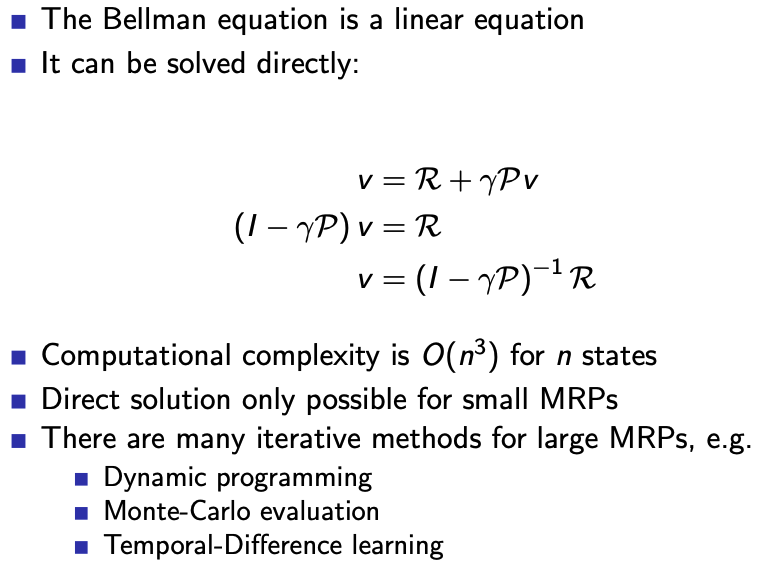
- 바로 풀 수 있는 방정식은 작은 MRP문제입니다.
- 큰 MRP문제에 대해서 알아보겠습니다.
- Dynamic-Programming
- Monte-Carlo evaluation
- Temporal-Difference learning
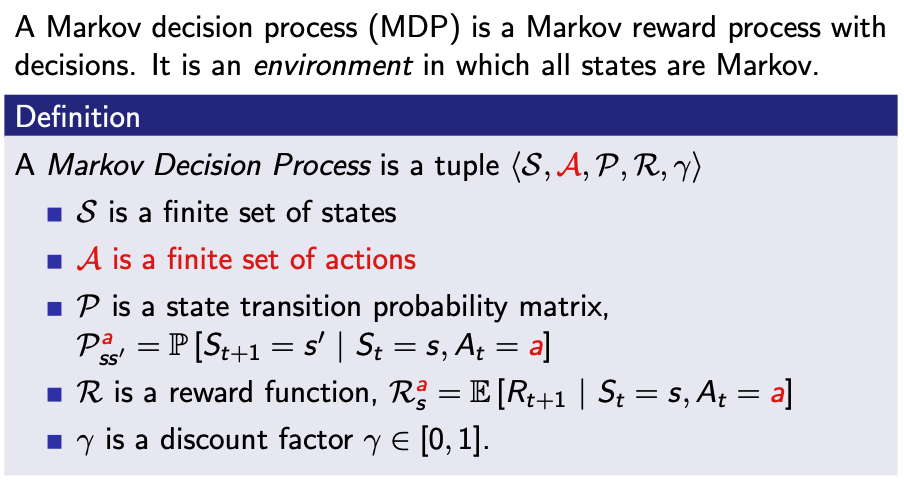
- 간결하게 말하자면 MDP는 MRP에서 Action만 더해진 것입니다.
- MDP는 $<S, A, P, R, \gamma>$로 나타낼 수 있다.
- $A$는 행동에 대한 유한한 집합입니다.
- 이때 $P$는 상태천이 행렬입니다.
$$P_{ss'}^{a} = P[S_{t+1} \mid S_{t} = s,A_{t} = a]$$
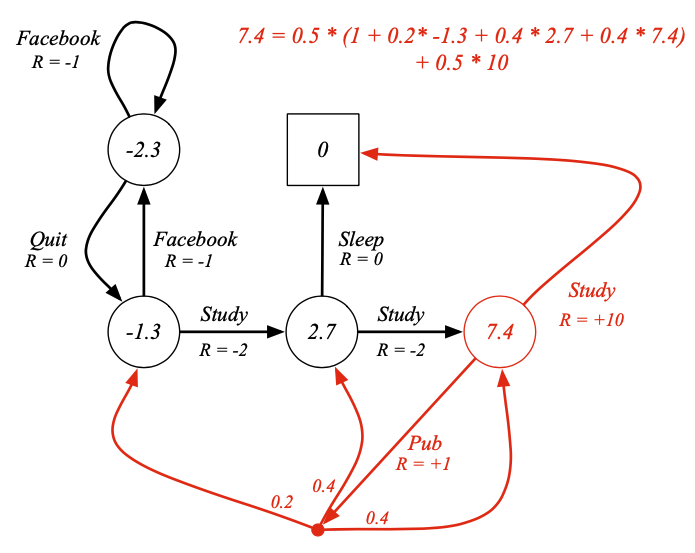
MRP에서는 State마다 Reward가 주어졌지만 MDP는 Action마다 Reward가 주어집니다.
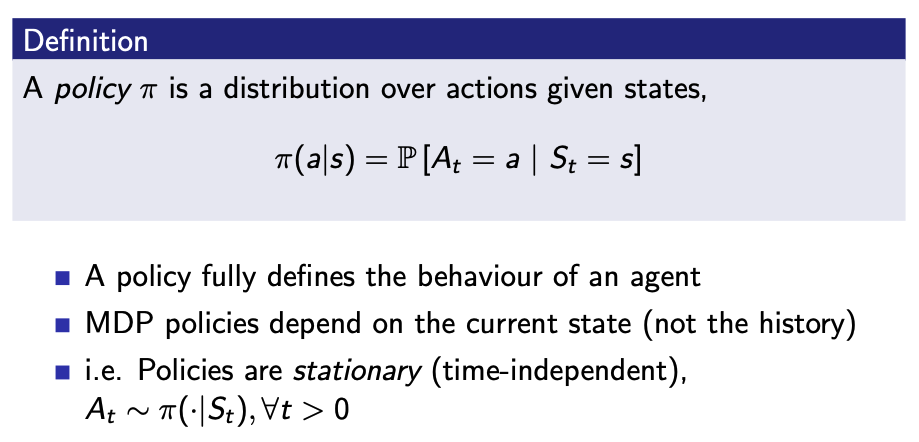
- 정책 $\pi$는 State가 주어졌을 때의 action 분포값입니다.
$$\pi(a \mid s) = P[A_{t}=a \mid S_{t} = s]$$
- policy는 Agent의 행동을 완전히 결정해줍니다.
- MDP에서의 Policy는 현재 State만 있다면 구할 수 있습니다.

- MDP $M = <S,A,P,R,\gamma>$ 그리고 정책 $\pi$
- 수열 State $S_{1},S_{2},...$는 Markov Process $<S, P^{t}>$
- 보상의 수열 $S_{1},R_{2},S_{2},...$는 MRP $<S,P^{\pi},R^{\pi},\gamma>$
$$P_{s,s'}^{\pi} = \sum_{a \in A}\pi(a \mid s)P_{ss'}^{a}$$
$$P_{s}^{\pi} = \sum_{a \in A}\pi(a \mid s)R_{s}^{a}$$
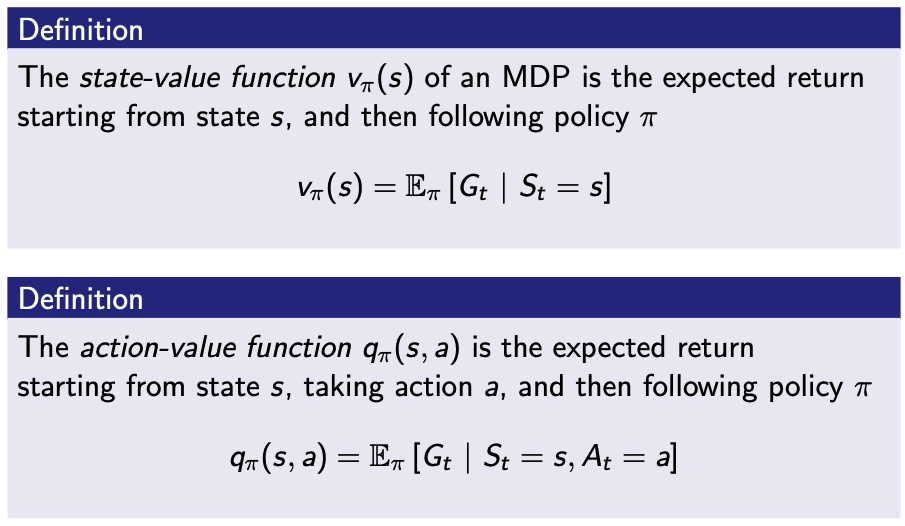
- 어떤 State에 대한 가치함수 $v_{\pi}(s)$는 policy $\pi$를 따라갑니다.(상태가치함수)
$$v_{\pi}(s) = E_{\pi}[G_{t} \mid S_{t} = s]$$
- 어떤 State에 대한 행동가치함수 $q_{\pi}(s,a)$는 정책 $\pi$를 따릅니다.(행동가치함수)
$$q_{\pi}(s,a) = E_{\pi}[G_{t} \mid S_{t} = s, A_{t} = a]$$

벨만 기댓값 방정식
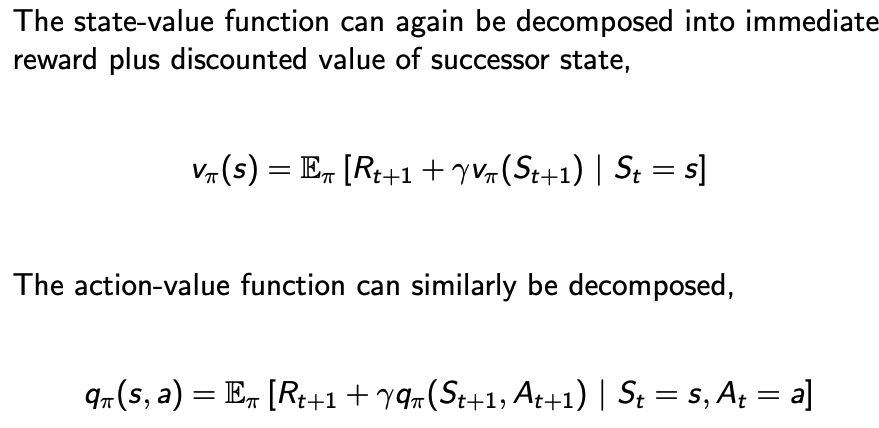
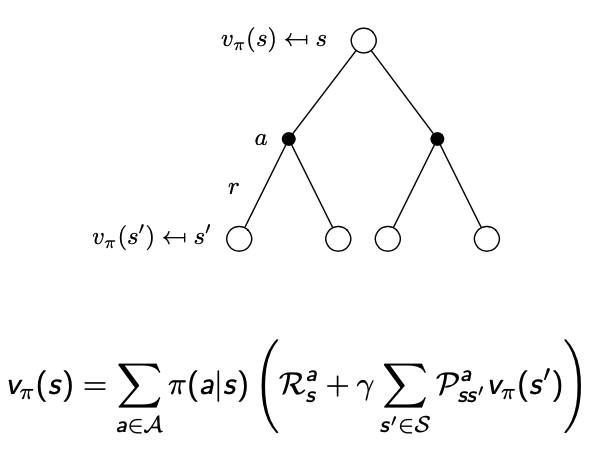
- 상태가치함수에 대해 표현하겠습니다.
$$v_{\pi}(s) = E_{\pi}[R_{t+1} +\gamma v_{\pi}(S_{t+1}) \mid S_{t} = s]$$
- 행동가치함수에 대해 표현하겠습니다.
$$q_{\pi}(s,a) = E_{\pi}[R_{t+1} + \gamma q_{\pi}(S_{t+1}, A_{t+1})\mid S_{t} = s, A_{t} = t]$$
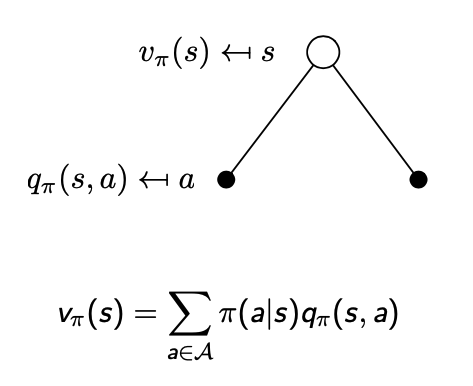
- 위의 그림은 상태가치함수에 대한 수식표현입니다.

- 위의 그림은 행동가치함수에 대한 수식표현입니다.


위의 그림은 벨만 기댓값 방정식을 행렬적으로 나타낸 것입니다.

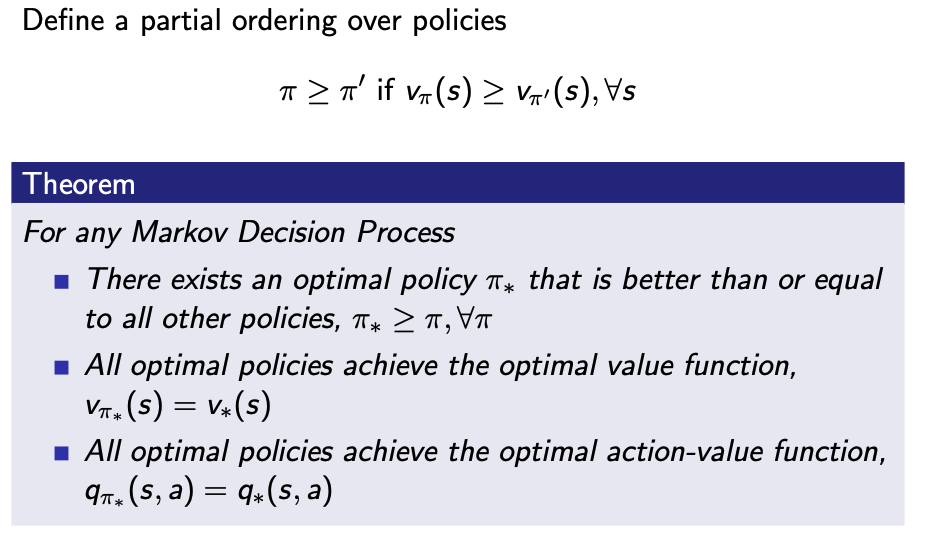
최적가치함수에 대해서 알아보겠습니다.
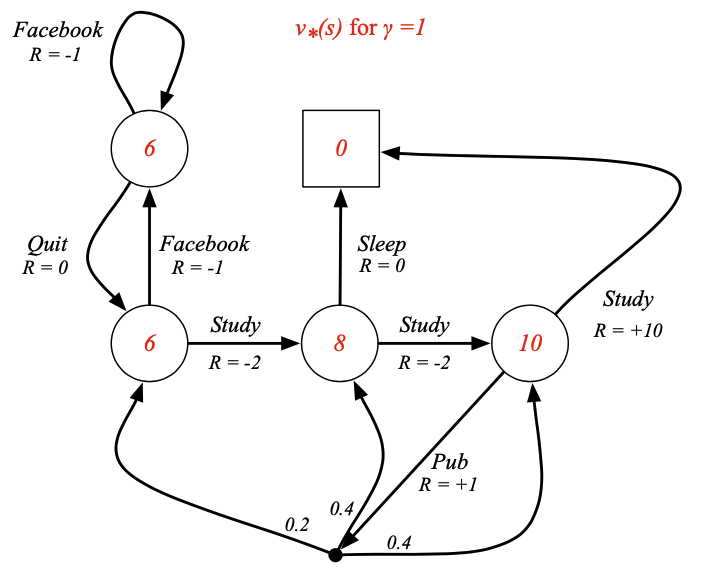
- 최적의 상태가치함수 $v_{*}(s)$는 모든 정책값을 최대화한 값입니다.
$$v_{*}(s) = \max_{\pi} v_{\pi}(s)$$
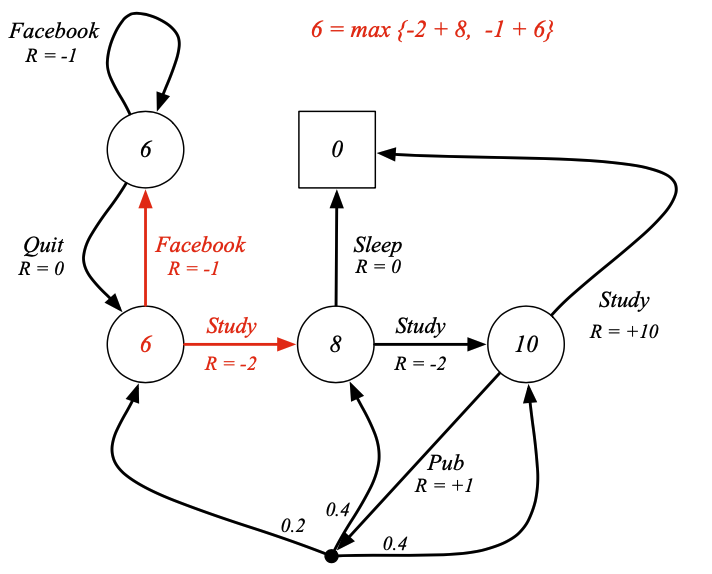
- 최적의 행동가치함수 $q_{*}(s,a)$는 행동값을 최대화하는 정책을 따른 것입니다.
$$q_{*}(s,a) = \max_{\pi}q_{\pi}(s,a)$$
※ MDP를 풀었다는 것은 우리는 최적의 가치함수를 찾았다는 말과 동일하다고 정의할 수 있습니다.
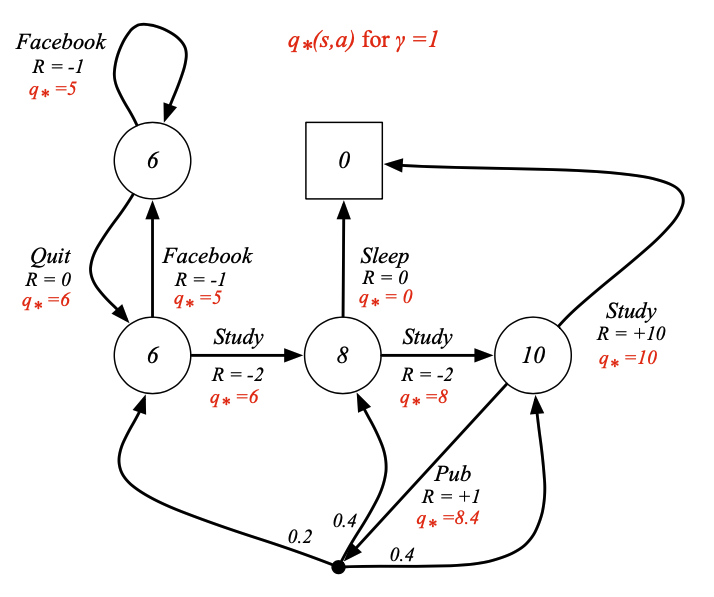
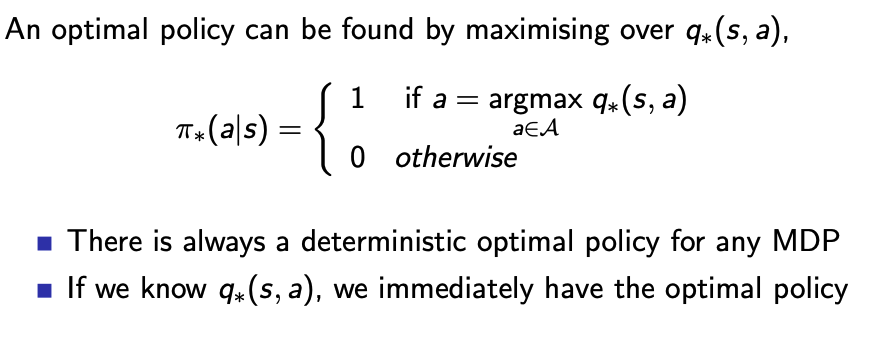
- 최적의 정책은 행동가치를 최대화하는 것을 찾았을 때의 가정입니다.
- 위의 수식은 최대화하는 행동가치함수의 action을 찾았을 때 어떤 MDP이던 결정론적 최적 정책이 존재합니다.(왜냐? 최댓값은 1, 나머지는 0이기 때문 본질은 Policy는 Stochastic이지만 위의 수식은 Deterministic이다.)
- 우리는 행동가치함수 $q_{*}(s,a)$를 찾았다고 할 때 즉각적으로 최적의 정책을 가지고 있다고 볼 수 있습니다.

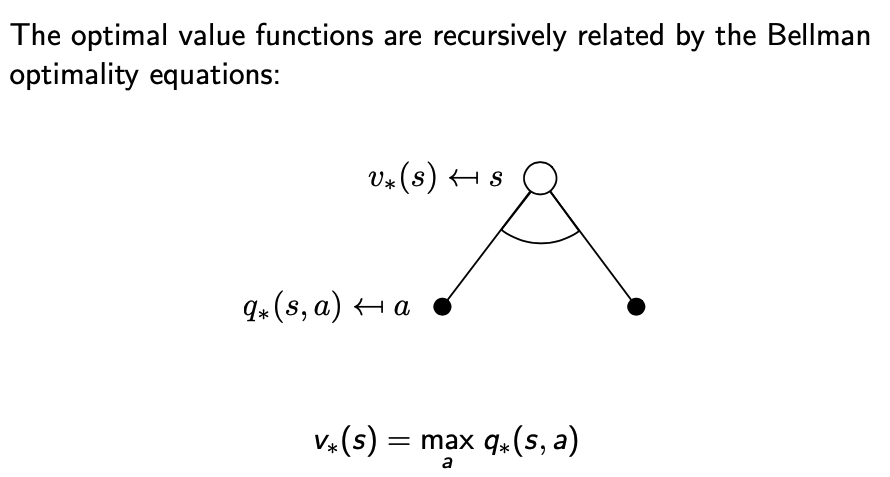


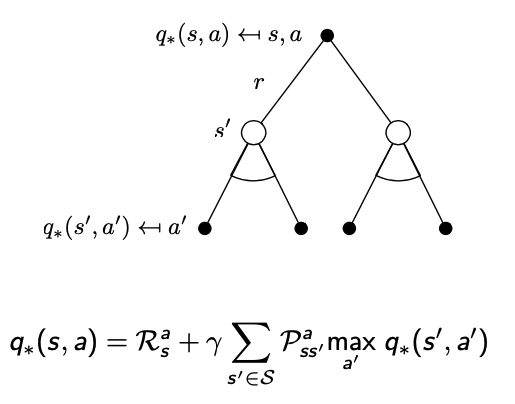
max가 있기 때문에 Linear하지 않습니다(결론적으로 수식을 풀어서 사용할 수 없습니다.)
- 벨만 최적 방정식은 선형적이지 않습니다.
- 해가 존재하지 않습니다.
- 많은 반복적인 해결책들이 존재합니다.
- 가치반복
- 정책반복
- Q-Learning
- 살사
'Reinfrocement Learning > David-Silver Lecture' 카테고리의 다른 글
| Lecture 6: Value Function Approximation (0) | 2021.02.04 |
|---|---|
| Lecture 5: Model-Free Control (0) | 2021.02.03 |
| Lecture 4: Model-Free Prediction (0) | 2021.02.03 |
| Lecture 3: Planning by Dynamic Programming (0) | 2021.02.02 |
| Lecture 1: Introduction to Reinforcement Learning (0) | 2021.02.01 |



